Professor
Faculty of Geosciences and Environmental EngineeringSouthwest Jiaotong University

Faculty of Geosciences and Environmental EngineeringSouthwest Jiaotong University
LIESMARSWuhan University
Nanyang Technological University
The Chinese University of Hong Kong
The Hong Kong Polytechnic University
LIESMARS
Wuhan University
Southwest Jiaotong University
Surveying and Mapping
Wuhan University
Railway Engineering
North Jiaotong University
Railway Engineering
Southwest Jiaotong University
Aerial Photogrammetry
Southwest Jiaotong University
Virtual Geographic Environments (VGEs) are proposed as a new generation of geographic analysis tool to contribute to human understanding of the geographic world and assist in solving geographic problems at a deeper level. The development of VGEs is focused on meeting the three scientific requirements of Geographic Information Science (GIScience) — multi-dimensional visualization, dynamic phenomenon simulation, and public participation. To provide a clearer image that improves user understanding of VGEs and to contribute to future scientific development, our research group is now focusing on some aspects of VGEs.
Generally, three major aspects are studied by our group: digital photogrammetry, multi-dimensional dynamic GIS and the Virtual Geographic Environments.
Prof. Zhu has supervised more than 50 Ph.D students, more than 100 masters and 5 postdocs, among which Li Yuan has won the best youth paper on the 2008 ISPRS Congress, the Ph.D dissertation of Dr. Bo Wu has been nominated as the best 100 Ph.D in 2008 and Dr. Tarek has won the scholarship of overseas students in 2008.
Aiming at the personalized navigation requirements of the tourists in complex scenic environments, an integrated navigation grid model is proposed to comprehensively represent the tourist preference and multidimensional dynamic environmental factors like the terrain, weather, tourist behaviors and related events. Based on this model, an A* algorithm of the dynamic routing for smart tourism is designed. The grid model of integrated multidimensional dynamic environmental information breaks through the limitation of the traditional tourist maps, which mainly depend on the static road network models, and supports the dynamic routing with an ability to perceive the real time environment and to adapt to tourist preference. To verify its effectiveness, the model was applied to the Dujiangyan scenic spot in a case study. The results show that the optimal route obtained by the proposed algorithm is 17.6% shorter than the recommended path in the integrated distance, and favors providing the dynamic, intelligent, precise and integrative location information service for tourists.
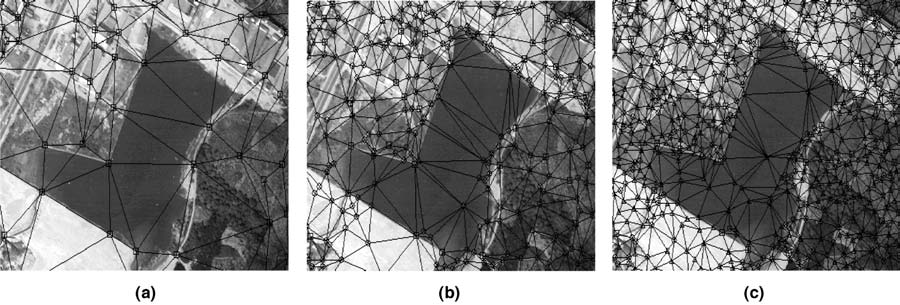
Semi-global matching (SGM) is essentially a discrete optimization for the disparity value of each pixel, under the assumption of disparity continuities. SGM overcomes the influence of the disparity discontinuities by a set of parameters. Using smaller parameters, the continuity constraint is weakened, which will cause significant noises in planar and textureless areas, reflected as the fluctuations on the final surface reconstruction. On the other hands, larger parameters will impose too much constraints on continuities, which may lead to losses of sharp features. To address this problem, this paper proposes an adaptive dense stereo matching methods for airborne images using with texture information. Firstly, the texture is quantified, and under the assumption that disparity variation is directly proportional to the texture information, the adaptive parameters are gauged accordingly. Second, SGM is adopted to optimize the discrete disparities using the adaptively tuned parameters. Experimental evaluations using the ISPRS benchmark dataset and images obtained by the SWDC-5 have revealed that the proposed method will significantly improve the visual qualities of the point clouds.
In order to avoid the disaster misjudgment and incorrect reports of landslide disaster, the detection and elimination of the gross errors of landslide monitoring data, has become a critical issue for the observational data quality control. The traditional data filtering methods using curve characteristics of single data source, which are limited by the characteristic of mutations-smooth relations and it is also hard to effectively distinguish the gross error and singular value induced by external factors. To overcome these problems, an approach for gross errors detection and elimination guided by landslide knowledge is proposed in this paper. Experimental results prove that more accurate and reliable landslide deformation information can be available. And proposed method can improve the automation and intelligent level of the gross errors detection and elimination for landslide monitoring data.
Focusing on the problems of inefficient 3D model scheduling and low visual consistency of complex 3D urban scene visualization, a self-adaptive organization and scheduling method for 3D urban scenes driven by visual perception is proposed. Based on the spatial distribution of 3D city models, the adaptive quadtree partition was used to divide the complex 3D scene into different levels of granularity. Subsequently, traversing the quadtree from bottom to top, levels of detail (LODs) were generated for the intermediate nodes, and the geometric error of each layer was calculated to construct a flexible multi-granularity 3D tile model. Finally, visual perception parameters such as the shape, size, and height of the building model were evaluated by employing the screen error, which was used to constrain the self-adaptive scheduling of LODs. The 3D models of four LODs in Berlin were selected for an interactive 3D roaming test. The experimental results show that the rendering frame rate was more than 40 f/s based on the view-related hierarchical LOD dynamic scheduling, which could ensure efficient dynamic scheduling and visual consistency of the complex 3D urban scene in a network environment.
Unmanned aerial vehicle (UAV) scheduling in emergency surveying and mapping (ESM) has complicated space and time constraints, with diverse scheduling schemes. The existing scheduling methods are generally based on human experience, and not reliable. In order to realize the rapid response of post disaster ESM, a fast scheduling method for UAV resources is proposed. The method comprehensively considers the constraints of the mission requirements, priorities, time windows, the geographical environment of the working area, and the ability of the UAV. A UAV scheduling model for ESM, is proposed that makes mission profit efficiency, mission completion rate, and scheduling risk as optimization objectives. This solution is based on ant colony algorithm. Experimental results verify the effectiveness of the scheduling method.
The visual analysis of spatio-temporal big data is not only the state-of-art research direction of both big data analysis and data visualization, but also the core module of pan-spatial information system. This paper reviews existing visual analysis methods at three levels:descriptive visual analysis, explanatory visual analysis and exploratory visual analysis, focusing on spatio-temporal big data's characteristics of multi-source, multi-granularity, multi-modal and complex association. The technical difficulties and development tendencies of multi-modal feature selection, innovative human-computer interaction analysis and exploratory visual reasoning in the visual analysis of spatio-temporal big data were discussed. Research shows that the study of descriptive visual analysis for data visualizationis is relatively mature.The explanatory visual analysis has become the focus of the big data analysis, which is mainly based on interactive data mining in a visual environment to diagnose implicit reason of problem. And the exploratory visual analysis method needs a major break-through.
Because of the lack of relationships between matching line and adjacent lines in the process of individual line matching, and the weak reliability of the individual line descriptor facing on discontinue texture, this paper presents a reliable line matching algorithm for stereo images with topological relationship. The algorithm firstly generates grouped line pairs from lines extracted from the reference image and searching image according to the basic topological relationships such as distance and angle between the lines. Then it takes the grouped line pairs as matching primitives, and matches these grouped line pairs by using epipolar constraint, homography constraint, quadrant constraint and gray correlation constraint of irregular triangle in order. And finally, it resolves the corresponding line pairs into two pairs of corresponding individual lines, and obtains one to one matching results after the post-processing of integrating, fitting, and checking. This paper adopts digital aerial images and close-range images with typical texture features to deal with the parameter analysis and line matching, and the experiment results demonstrate that the proposed algorithm in this paper can obtain reliable line matching results.
Area coverage using imaging reconnaissance satellites belongs to mission planning problems constrained by spatio-temporal information. The current area coverage algorithms can be divided into two categories:based on single-satellite and multi-satellite. The former cannot fully utilize satellite resources, and is replaced by the latter gradually. However, the latter usually applies the existing intelligent optimization approaches simply. In addition, the drawback of both is heavily depending on user's intervene. Therefore, in this paper, a self-adaptive approach is proposed for the low-effective and time-consuming issue of current covering algorithms. Firstly, a self-adaptive way for grid division is presented to automatically generate grid; secondly, in order to balance imaging accuracy and efficiency, the largest visual coverage computing is proposed to determine the angle of each satellite; thirdly, a semantic-based sliding window optimizing strategy is designed to calculate planning sequence for area coverage. Compared with the classic algorithms, this method reduces human-computer interaction, and is more effective and robust. It has already been applied in area coverage of real conditions.
The semantic classification of point clouds is a fundamental part of three-dimensional urban reconstruction. For datasets with high spatial resolution but significantly more noises, a general trend is to exploit more contexture information to surmount the decrease of discrimination of features for classification. However, previous works on adoption of contexture information are either too restrictive or only in a small region and in this paper, we propose a point cloud classification method based on multi-level semantic relationships, including point–homogeneity, supervoxel–adjacency and class–knowledge constraints, which is more versatile and incrementally propagate the classification cues from individual points to the object level and formulate them as a graphical model. The point–homogeneity constraint clusters points with similar geometric and radiometric properties into regular-shaped supervoxels that correspond to the vertices in the graphical model. The supervoxel–adjacency constraint contributes to the pairwise interactions by providing explicit adjacent relationships between supervoxels. The class–knowledge constraint operates at the object level based on semantic rules, guaranteeing the classification correctness of supervoxel clusters at that level. International Society of Photogrammetry and Remote Sensing (ISPRS) benchmark tests have shown that the proposed method achieves state-of-the-art performance with an average per-area completeness and correctness of 93.88% and 95.78%, respectively. The evaluation of classification of photogrammetric point clouds and DSM generated from aerial imagery confirms the method’s reliability in several challenging urban scenes.
Intelligent navigation and facility management in complex indoor environments are issues at the forefront of geospatial information science. Indoor spaces with fine geometric and semantic descriptions provide a solid foundation for various indoor applications, but it is difficult to comprehensively extract free multi-floor indoor spaces from complex three-dimensional building models, such as those described using CityGML LoD4, with existing methods for the subdivision or extraction of indoor spaces based on vector topology processing. Therefore, this paper elaborates a new voxelbased approach for extracting free multi-floor indoor spaces from 3D building models. It transforms the complicated vector processing tasks into a simple raster process that consists of three steps: voxelization with semantic enhancement, voxel classification, and boundary extraction. Experiments illustrate that the proposed method can automatically and correctly extract free multi-floor indoor spaces, especially two typical kinds of open indoor spaces, namely, lobbies and staircases.
Indoor emergency response plays a critically important role in disaster management for cities, which must consider the evacuation of people in a dynamic indoor environment. The spatial model is the foundation for the specific analysis of indoor emergency responses, such as evacuations. The current spatial model for evacuation has three primary pitfalls: (1) it primarily focuses on static spatial information, such as rooms, doors, and windows, and lacks dynamic information, such as events and sensors; (2) it mainly focuses on the horizontal space and the static scene and lacks a multi-story component that considers the different properties of stairs compared to planar areas; and (3) it places emphasis on the indoor navigation calculation with a 2D/3D network, which lacks individual properties that can support more complicated analysis, such as congestion and stagnation. In this paper, we propose a dynamic indoor field model with three typical characteristics. (1) It includes not only static information but also dynamic information, such as outdoor and indoor building geometry, sensors, fire spread, and personnel behavior. (2) It supports multi-story buildings from the macro level (building level and floor level) to the micro level (room level and individual level) based on horizontal and vertical indoor space. (3) It supports spatial calculations based on a three-dimensional space grid and can analyze potential congestion and stagnation during evacuation. We design a corresponding evacuation method that supports individual evacuation route finding and evacuation assessment. We perform a series of analyses of the applicability of the proposed model and the efficiency of the designed evacuation method based on multi-story evacuation studies. The simulation includes a total evacuation population exceeding 7000 individuals, and the analysis suggests that the new model and algorithm are effective in planning indoor emergency routes that avoid potential congestion or stagnation.
The flood disaster management system (FDMS) is a platform developed to provide ongoing disaster reduction capabilities that cover the entire process of flood management. The ontology-based approach links environmental models with disaster-related data to support FDMS-constructed workflows with suitable models and recommend appropriate datasets as model input automatically. This automated activity for model selection and data binding reduces the time-consuming and unreliable operations involved in traditional management techniques, which rely on manual retrieval through simple metadata indices—typically when flood management personnel are overwhelmed with large quantities of observed data. The OpenMI-based modular design used in the system unifies interfaces and data exchange to provide flexible and extensible architecture. Subsequent 3D visualization improves the interpretability of disaster data and the effectiveness of decision-making processes. This paper presents an overview of the design and capabilities of FDMS that provides one-stop management for flood disasters.
Monitoring, response, mitigation and damage assessment of disasters places a wide variety of demands on the spatial and temporal resolutions of remote sensing images. Images are divided into tile pyramids by data sources or resolutions and published as independent image services for visualization. A disaster-affected area is commonly covered by multiple image layers to express hierarchical surface information, which generates a large amount of namesake tiles from different layers that overlay the same location. The traditional tile retrieval method for visualization cannot distinguish between distinct layers and traverses all image datasets for each tile query. This process produces redundant queries and invalid access that can seriously affect the visualization performance of clients, servers and network transmission. This paper proposes an on-demand retrieval method for multi-layer images and defines semantic annotations to enrich the description of each dataset. By matching visualization demands with the semantic information of datasets, this method automatically filters inappropriate layers and finds the most suitable layer for the final tile query. The design and implementation are based on a two-layer NoSQL database architecture that provides scheduling optimization and concurrent processing capability. The experimental results reflect the effectiveness and stability of the approach for multi-layer retrieval in disaster reduction visualization.
Constructing 3D railway scenes helps improve the railway information construction ability and the comprehensive railway management level. However, the existing modeling methods have disadvantages such as low flexibility in scene configuration, weak extensibility of scene objects and poor reusability of modeling knowledge. To enable multitype 3D railway scenes to be automatically constructed, a template-based knowledge reuse method was proposed in this paper. First, based on parsing of modeling operation characteristics and modeling knowledge expression, a modeling knowledge template was designed to store modeling knowledge and modeling operations in a parameterized way. The contents of this template were described in terms of semantic information, geometric information, topologic information and reference system information, and the method for instantiating the modeling knowledge template was proposed. Second, a scene configuration template was designed to organize the instantiated modeling knowledge files and scene objects. By the use of a flexible tree structure, the scene configuration template enables extensibility of scene objects. Finally, the two types of templates were parsed in terms of scene organization, linear referencing information, geometric and topologic relationships, and semantic descriptions. In this way, different types of 3D railway scenes were generated automatically. After a prototype system was developed, experiments on automatic modeling of two 3D railway scenes were carried out to verify the template-based knowledge reuse method. The experimental results show that the proposed method can be used to generate multitype 3D railway scenes automatically. With this method, model combination can be configured, model types can be extended and modeling knowledge can be reused.
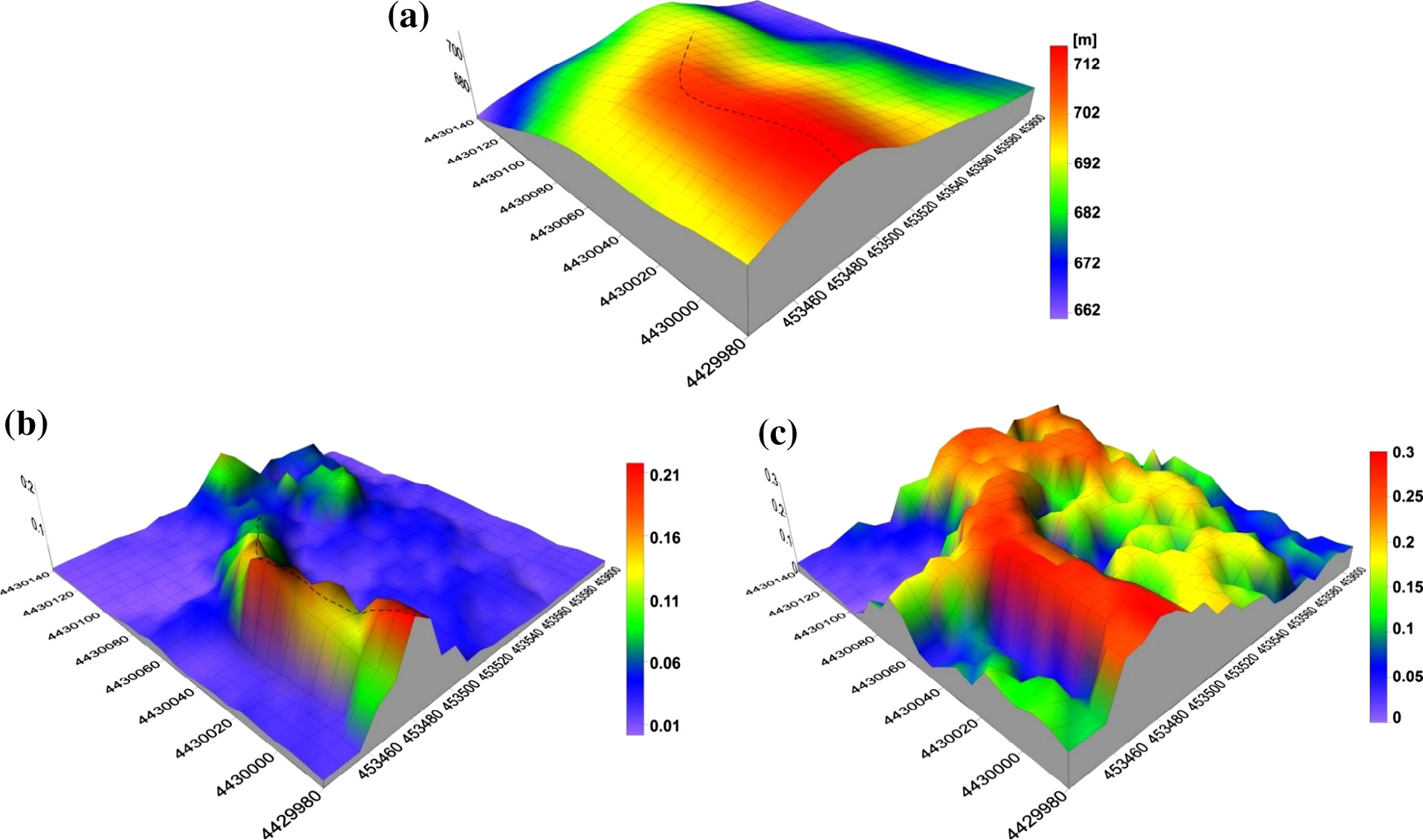
A novel method called knowledge-guided spatio-temporal consistent correlation analysis (KSTCCA) was developed to discover reliable deformation features induced by multiple factors based on multimode landslide monitoring data. Compared to conventional approaches, KSTCCA integrates both temporal and spatial correlation analysis to improve the consistency of deformation patterns and capture the spatio-temporal heterogeneities in multimode monitoring data. KSTCCA considers both the landslide deformation mechanisms and the relationships between different influential factors as knowledge. Moreover, the method extracts the morphological structures of monitoring curves based on a seven-point approach and identifies knowledge rules using the k-means clustering method. Under the guidance of prior knowledge, a spatial correlation analysis is conducted based on support vector regression, and a temporal correlation analysis of the time lag is carried out based on the morphological structure features. Finally, three kinds of typical monitoring data, including deformation, rainfall, and reservoir water level data collected in the Baishuihe landslide area, China, are used for experimental analysis to verify the validity of the proposed method.
Improving the matching reliability of multi-sensor imagery is one of the most challenging issues in recent years, particularly for synthetic aperture radar (SAR) and optical images. It is difficult to deal with the noise influence, geometric distortions, and nonlinear radiometric difference between SAR and optical images. In this paper, a method for SAR and optical images matching is proposed. First, interest points that are robust to speckle noise in SAR images are detected by improving the original phase-congruency-based detector. Second, feature descriptors are constructed for all interest points by combining a new Gaussian-Gamma-shaped bi-windows-based gradient operator and the histogram of oriented gradient pattern. Third, descriptor similarity and geometrical relationship are combined to constrain the matching processing. Finally, an approach based on global and local constraints is proposed to eliminate outliers. In the experiments, SAR images including COSMO-Skymed, RADARSAT-2, TerraSAR-X and HJ-1C images, and optical images including ZY-3 and Google Earth images are used to evaluate the performance of the proposed method. The experimental results demonstrate that the proposed method provides significant improvements in the number of correct matches and matching precision compared with the state-of-the-art SIFT-like methods. Near 1 pixel registration accuracy is obtained based on the matching results of the proposed method.
The Open Geospatial Consortium (OGC) Geography Markup Language (GML) standard provides basic types and a framework for defining geo-informational data models such as CityGML and IndoorGML, which provide standard information models for 3D city modelling and lightweight indoor network navigation. Location information, which is the semantic engine that fuses big geo-information data, is however, discarded in these standards. The Chinese national standard of Indoor Multi-Dimensional Location GML (IndoorLocationGML) presented in this study can be used in ubiquitous indoor location intelligent applications for people and robots. IndoorLocationGML is intended as an indoor multi-dimensional location information model and exchange data format standard, mainly for indoor positioning and navigation. This paper introduces the standard’s main features: (1) terminology; (2) indoor location information model using a Unified Modeling Language (UML) class diagram; (3) indoor location information markup language based on GML; and (4) use cases. A typical application of the standard is then discussed. This standard is applicable to the expression, storage, and distribution of indoor multi-dimensional location information, and to the seamless integration of indoor–outdoor location information. The reference and basis are therefore relevant to publishers, managers, users, and developers of indoor navigation and location-based services (LBS).
The rapid and accurate assessment of building damage states using only post-event remote sensing data is critical when performing loss estimation in earthquake emergency response. Damaged roof detection is one of the most efficient methods of assessing building damage. In particular, airborne LiDAR is often used to detect roofs damaged by earthquakes, especially for certain damage types, due to its ability to rapidly acquire accurate 3D information on individual roofs. Earthquake-induced roof damages are categorized into surface damages and structural damages based on the geometry features of the debris and the roof structure. However, recent studies have mainly focused on surface damage; little research has been conducted on structural damage. This paper presents an original 3D shape descriptor of individual roofs for detecting roofs with surface damage and roofs exhibiting structural damage by identifying spatial patterns of compact and regular contours for intact roofs, as well as jagged and irregular contours for damaged roofs. The 3D shape descriptor is extracted from building contours derived from airborne LiDAR point clouds. First, contour clusters are extracted from contours that are generated from a dense DSM of individual buildings derived from point clouds. Second, the shape chaos indexes of contour clusters are computed as the information entropy through a contour shape similarity measurement between two contours in a contour cluster. Finally, the 3D shape descriptor is calculated as the weighted sum of the shape chaos index of each contour cluster corresponding to an individual roof. Damaged roofs are detected solely using the 3D shape descriptor with the maximum entropy threshold. Experiments using post-event airborne LiDAR point clouds of the 2010 Haiti earthquake suggest that the proposed damaged roof detection technique using the proposed 3D shape descriptor can detect both roofs exhibiting surface damage and roofs exhibiting structural damage with a high accuracy.
Least-squares matching is a standard procedure in photogrammetric applications for obtaining sub-pixel accuracies of image correspondences. However, least-squares matching has also been criticized for its instability, which is primarily reflected by the requests for the initial correspondence and favorable image quality. In image matching between oblique images, due to the blur, illumination differences and other effects, the image attributes of different views are notably different, which results in a more severe convergence problem. Aiming at improving the convergence rate and robustness of least-squares matching of oblique images, we incorporated prior geometric knowledge in the optimization process, which is reflected as the bounded constraints on the optimizing parameters that constrain the search for a solution to a reasonable region. Furthermore, to be resilient to outliers, we substituted the square loss with a robust loss function. To solve the composite problem, we reformulated the least-squares matching problem as a bound constrained optimization problem, which can be solved with bounds constrained Levenberg–Marquardt solver. Experimental results consisting of images from two different penta-view oblique camera systems confirmed that the proposed method shows guaranteed final convergences in various scenarios compared to the approximately 20–50% convergence rate of classical least-squares matching.
Combined bundle adjustment is a fundamental step in the processing of massive oblique images. Traditional bundle adjustment designed for nadir images gives identical weights to different parts of image point observations made from different directions, due to the assumption that the errors in the observations follow the same Gaussian distribution. However, because of their large tilt angles, aerial oblique images have trapezoidal footprints on the ground, and their areas correspond to conspicuously different ground sample distances. The errors in different observations no longer conform to the above assumption, which leads to suboptimal bundle adjustment accuracy and restricts subsequent 3D applications. To model the distribution of the errors correctly for the combined bundle adjustment of oblique images, this paper proposes an asymmetric re-weighting method. The scale of each pixel is used to determine a re-weighting factor, and each pixel is subsequently projected onto the ground to identify another anisotropic re-weighting factor using the shape of its quadrangle. Next, these two factors are integrated into the combined bundle adjustment using asymmetric weights for the image point observations; greater weights are assigned to observations with fine resolutions, and those with coarse resolutions are penalized. This paper analyzes urban and rural images captured by three different five-angle camera systems, from both proprietary datasets and the ISPRS/EuroSDR benchmark. The results reveal that the proposed method outperforms the traditional method in both back-projected and triangulated precision by approximately 5–10% in most cases. Furthermore, the misalignments of point clouds generated by the different cameras are significantly alleviated after combined bundle adjustment.
RGB-D sensors (sensors with RGB camera and Depth camera) are novel sensing systems that capture RGB images along with pixel-wise depth information. Although they are widely used in various applications, RGB-D sensors have significant drawbacks including limited measurement ranges (e.g., within 3 m) and errors in depth measurement increase with distance from the sensor with respect to 3D dense mapping. In this paper, we present a novel approach to geometrically integrate the depth scene and RGB scene to enlarge the measurement distance of RGB-D sensors and enrich the details of model generated from depth images. First, precise calibration for RGB-D Sensors is introduced. In addition to the calibration of internal and external parameters for both, IR camera and RGB camera, the relative pose between RGB camera and IR camera is also calibrated. Second, to ensure poses accuracy of RGB images, a refined false features matches rejection method is introduced by combining the depth information and initial camera poses between frames of the RGB-D sensor. Then, a global optimization model is used to improve the accuracy of the camera pose, decreasing the inconsistencies between the depth frames in advance. In order to eliminate the geometric inconsistencies between RGB scene and depth scene, the scale ambiguity problem encountered during the pose estimation with RGB image sequences can be resolved by integrating the depth and visual information and a robust rigid-transformation recovery method is developed to register RGB scene to depth scene. The benefit of the proposed joint optimization method is firstly evaluated with the publicly available benchmark datasets collected with Kinect. Then, the proposed method is examined by tests with two sets of datasets collected in both outside and inside environments. The experimental results demonstrate the feasibility and robustness of the proposed method.
Textureless and geometric discontinuities are major problems in state-of-the-art dense image matching methods, as they can cause visually significant noise and the loss of sharp features. Binary census transform is one of the best matching cost methods but in textureless areas, where the intensity values are similar, it suffers from small random noises. Global optimization for disparity computation is inherently sensitive to parameter tuning in complex urban scenes, and must compromise between smoothness and discontinuities. The aim of this study is to provide a method to overcome these issues in dense image matching, by extending the industry proven Semi-Global Matching through 1) developing a ternary census transform, which takes three outputs in a single order comparison and encodes the results in two bits rather than one, and also 2) by using texture-information to self-tune the parameters, which both preserves sharp edges and enforces smoothness when necessary. Experimental results using various datasets from different platforms have shown that the visual qualities of the triangulated point clouds in urban areas can be largely improved by these proposed methods.
RGB-D sensors are novel sensing systems that capture RGB images along with pixel-wise depth information. Although they are widely used in various applications, RGB-D sensors have significant drawbacks with respect to 3D dense mapping of indoor environments. First, they only allow a measurement range with a limited distance (e.g., within 3 m) and a limited field of view. Second, the error of the depth measurement increases with increasing distance to the sensor. In this paper, we propose an enhanced RGB-D mapping method for detailed 3D modeling of large indoor environments by combining RGB image-based modeling and depth-based modeling. The scale ambiguity problem during the pose estimation with RGB image sequences can be resolved by integrating the information from the depth and visual information provided by the proposed system. A robust rigid-transformation recovery method is developed to register the RGB image-based and depth-based 3D models together. The proposed method is examined with two datasets collected in indoor environments for which the experimental results demonstrate the feasibility and robustness of the proposed method
Improving the matching reliability of low-altitude images is one of the most challenging issues in recent years, particularly for images with large viewpoint variation. In this study, an approach for low-altitude remote sensing image matching that is robust to the geometric transformation caused by viewpoint change is proposed. First, multiresolution local regions are extracted from the images and each local region is normalized to a circular area based on a transformation. Second, interest points are detected and clustered into local regions. The feature area of each interest point is determined under the constraint of the local region which the point belongs to. Then, a descriptor is computed for each interest point by using the classical scale invariant feature transform (SIFT). Finally, a feature matching strategy is proposed on the basis of feature similarity confidence to obtain reliable matches. Experimental results show that the proposed method provides significant improvements in the number of correct matches compared with other traditional methods.
With the goal to achieve an accuracy navigation within the building environment, it is critical to explore a feasible way for building the connectivity relationships among 3D geographical features called in-building topology network. Traditional topology construction approaches for indoor space always based on 2D maps or pure geometry model, which remained information insufficient problem. Especially, an intelligent navigation for different applications depends mainly on the precise geometry and semantics of the navigation network. The trouble caused by existed topology construction approaches can be smoothed by employing IFC building model which contains detailed semantic and geometric information. In this paper, we present a method which combined a straight media axis transformation algorithm (S-MAT) with IFC building model to reconstruct indoor geometric topology network. This derived topology aimed at facilitating the decision making for different in-building navigation. In this work, we describe a multi-step deviation process including semantic cleaning, walkable features extraction, Multi-Storey 2D Mapping and S-MAT implementation to automatically generate topography information from existing indoor building model data given in IFC.
Indoor navigation is increasingly widespread in complex indoor environments, and indoor path planning is the most important part of indoor navigation. Path planning generally refers to finding the most suitable path connecting two locations, while avoiding collision with obstacles. However, it is a fundamental problem, especially for 3D complex building model. A common way to solve the issue in some applications has been approached in a number of relevant literature, which primarily operates on 2D drawings or building layouts, possibly with few attached attributes for obstacles. Although several digital building models in the format of 3D CAD have been used for path planning, they usually contain only geometric information while losing abundant semantic information of building components (e.g. types and attributes of building components and their simple relationships). Therefore, it becomes important to develop a reliable method that can enhance application of path planning by combining both geometric and semantic information of building components. This paper introduces a method that support 3D indoor path planning with semantic information.
With the rapid development of sensor networks and Earth observation technology, a large quantity of disaster-related data is available, such as remotely sensed data, historic data, case data, simulated data, and disaster products. However, the efficiency of current data management and service systems has become increasingly difficult due to the task variety and heterogeneous data. For emergency task-oriented applications, the data searches primarily rely on artificial experience based on simple metadata indices, the high time consumption and low accuracy of which cannot satisfy the speed and veracity requirements for disaster products. In this paper, a task-oriented correlation method is proposed for efficient disaster data management and intelligent service with the objectives of 1) putting forward disaster task ontology and data ontology to unify the different semantics of multi-source information, 2) identifying the semantic mapping from emergency tasks to multiple data sources on the basis of uniform description in 1), and 3) linking task-related data automatically and calculating the correlation between each data set and a certain task. The method goes beyond traditional static management of disaster data and establishes a basis for intelligent retrieval and active dissemination of disaster information. The case study presented in this paper illustrates the use of the method on an example flood emergency relief task.
Public security incidents have been increasingly challenging to address with their new features, including large-scale mobility, multi-stage dynamic evolution, spatio-temporal concurrency and uncertainty in the complex urban environment, which require spatio-temporal association analysis among multiple regional video data for global cognition. However, the existing video data organizational methods that view video as a property of the spatial object or position in space dissever the spatio-temporal relationship of scattered video shots captured from multiple video channels, limit the query functions on interactive retrieval between a camera and its video clips and hinder the comprehensive management of event-related scattered video shots. GeoVideo, which maps video frames onto a geographic space, is a new approach to represent the geographic world, promote security monitoring in a spatial perspective and provide a highly feasible solution to this problem. This paper analyzes the large-scale personnel mobility in public safety events and proposes a multi-level, event-related organization method with massive GeoVideo data by spatio-temporal trajectory. This paper designs a unified object identify(ID) structure to implicitly store the spatio-temporal relationship of scattered video clips and support the distributed storage management of massive cases. Finally, the validity and feasibility of this method are demonstrated through suspect tracking experiments.
This paper proposes a reliable feature point matching method for oblique images using various spatial relationships and geometrical information for the problems resulted by the large view point changes, the image deformations, blurring, and other factors. Three spatial constraints are incorporated to filter possible outliers, including a cyclic angular ordering constraint, a local position constraint, and a neighborhood conserving constraint. Other ancillary geometric information, which includes the initial exterior orientation parameters that are obtained from the platform parameters and a rough DEM, are used to transform the oblique images geometrically and reduce the perspective deformations. Experiment results revealed that the proposed method is superior to the standard SIFT regarding both precision and correct matches using images obtained by the SWDC-5 system.
The filtering of point clouds is a ubiquitous task in the processing of airborne laser scanning (ALS) data; however, such filtering processes are difficult because of the complex configuration of the terrain features. The classical filtering algorithms rely on the cautious tuning of parameters to handle various landforms. To address the challenge posed by the bundling of different terrain features into a single dataset and to surmount the sensitivity of the parameters, in this study, we propose an adaptive surface filter (ASF) for the classification of ALS point clouds. Based on the principle that the threshold should vary in accordance to the terrain smoothness, the ASF embeds bending energy, which quantitatively depicts the local terrain structure to self-adapt the filter threshold automatically. The ASF employs a step factor to control the data pyramid scheme in which the processing window sizes are reduced progressively, and the ASF gradually interpolates thin plate spline surfaces toward the ground with regularization to handle noise. Using the progressive densification strategy, regularization and self-adaption, both performance improvement and resilience to parameter tuning are achieved. When tested against the benchmark datasets provided by ISPRS, the ASF performs the best in comparison with all other filtering methods, yielding an average total error of 2.85% when optimized and 3.67% when using the same parameter set.
In recent years, there has been tremendous growth in the field of indoor and outdoor positioning sensors continuously producing huge volumes of trajectory data that has been used in many fields such as location-based services or location intelligence. Trajectory data is massively increased and semantically complicated, which poses a great challenge on spatio-temporal data indexing. This paper proposes a spatio-temporal data indexing method, named HBSTR-tree, which is a hybrid index structure comprising spatio-temporal R-tree, B*-tree and Hash table. To improve the index generation efficiency, rather than directly inserting trajectory points, we group consecutive trajectory points as nodes according to their spatio-temporal semantics and then insert them into spatio-temporal R-tree as leaf nodes. Hash table is used to manage the latest leaf nodes to reduce the frequency of insertion. A new spatio-temporal interval criterion and a new node-choosing sub-algorithm are also proposed to optimize spatio-temporal R-tree structures. In addition, a B*-tree sub-index of leaf nodes is built to query the trajectories of targeted objects efficiently. Furthermore, a database storage scheme based on a NoSQL-type DBMS is also proposed for the purpose of cloud storage. Experimental results prove that HBSTR-tree outperforms TB*-tree in some aspects such as generation efficiency, query performance and query type.
Our study proposes a new local model to accurately control an avatar using six inertial sensors in real-time. Creating such a system to assist interactive control of a full-body avatar is challenging because control signals from our performance interfaces are usually inadequate to completely determine the whole body movement of human actors. We use a pre-captured motion database to construct a group of local regression models, which are used along with the control signals to synthesize whole body human movement. By synthesizing a variety of human movements based on actors’ control in real-time, this study verifies the effectiveness of the proposed system. Compared with the previous models, our proposed model can synthesize more accurate results. Our system is suitable for common use because it is much cheaper than commercial motion capture systems.
三维GIS 是当今乃至未来GIS 技术的主要标志性内容之一,它突破了空间信息在二维地图平面中单调表现 的束缚,为各行各业以及人们的日常生活提供了更有效的辅助决策支持。本文重点介绍了三维GIS 的数据模型、 数据库管理和可视化分析等关键技术及其研究进展,并以武汉市为例展示了三维GIS 对城市立体空间的整体表 达,为大城市、全市域的三维数字城市建设奠定了基础,最后探讨了在智慧城市建设与城市安全中三维GIS将发挥 日益重要的时空信息承载引擎与空间智能技术支撑作用。
 A New Generation of Geographic Analysis Tool.jpg)
Abstract Virtual Geographic Environments (VGEs) are proposed as a new generation of geographic analysis tool to contribute to human understanding of the geographic world and assist in solving geographic problems at a deeper level. The development of VGEs is focused on meeting the three scientific requirements of Geographic Information Science (GIScience) — multi-dimensional visualization, dynamic phenomenon simulation, and public participation. To provide a clearer image that improves user understanding of VGEs and to contribute to future scientific development, this article reviews several aspects of VGEs. First, the evolutionary process from maps to previous GISystems and then to VGEs is illustrated, with a particular focus on the reasons VGEs were created. Then, extended from the conceptual framework and the components of a complete VGE, three use cases are identified that together encompass the current state of VGEs at different application levels: 1) a tool for geo-object-based multi-dimensional spatial analysis and multi-channel interaction, 2) a platform for geo-process-based simulation of dynamic geographic phenomena, and 3) a workspace for multi-participant-based collaborative geographic experiments. Based on the above analysis, the differences between VGEs and other similar platforms are discussed to draw their clear boundaries. Finally, a short summary of the limitations of current VGEs is given, and future directions are proposed to facilitate ongoing progress toward forming a comprehensive version of VGEs.
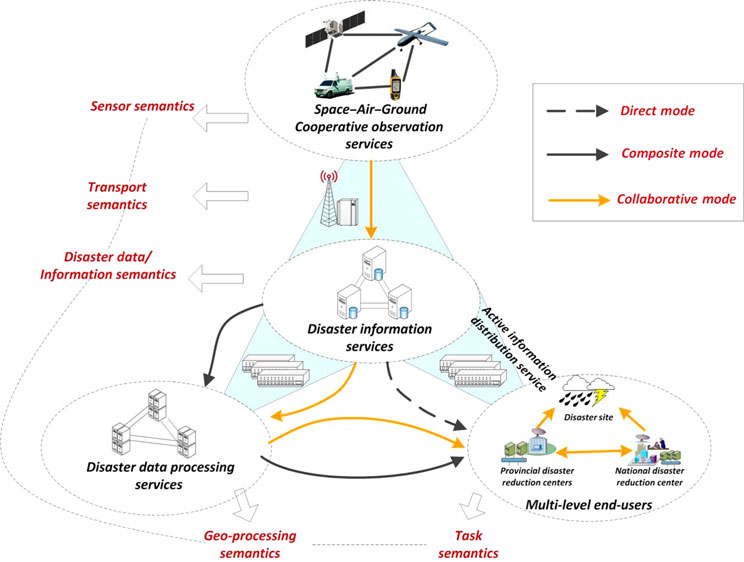
The Chinese Government and citizens face enormous challenges of disaster management as widespread devastation, economic damages, and loss of human lives caused by increasing natural disasters. Disaster management requires a complicated iterative process that includes disaster monitoring, early detection, forecasting, loss assessment, and efficient analysis of disaster reduction. Each task typically involves the use of technologists and multiple geospatial information resources, including sensors, data sources, models, geo-tools, software packages, and computing resources. However, most existing disaster management systems operate in a typical passive data-centric mode, where resources cannot be fully utilized. This impediment is partially being addressed by the increasingly complex application requirements and the growing availability of diverse resources. In this paper, we summarize and analyze the practical problems experienced by the National Disaster Reduction Application System of China. To address the issues of data-centric, centralized, isolated solutions, we propose a novel Focusing Service Mechanism, which is capable of scheduling and allocating for optimum utilization of multiple resources, to dynamically generate collaborative and on-demand disaster information services. We also demonstrate the design and implementation of the Integrated Disaster Information Service System (IDISS). Through the service strategies of Virtualizing, Wrapping, and Integrating, disaster-related resources are constructed into services in the IDISS. These services are dynamically aggregated into focusing service chains, for diverse disaster management tasks. Actual applications illustrate that the proposed service system can significantly improve the capability of disaster management in China.
A complex 3D city model contains detailed descriptions of both its appearance and its internal structure, including architectural components. Because of the topological complexity and the large volumes of data in such models, profiling is an effective method to present the internal structure, the distributed characteristics, and the hierarchical relationships of the model to provide intuitive visual information to the viewer and to reveal the relationships between the elements of the model and the whole. However, with commonly used boundary descriptions, it is difficult to comprehensively preserve the consistency of three-dimensional profiling using existing algorithms based on geometric constraints. This paper proposes a novel semantics-constrained profiling approach to ensure the consistency of the geometrical, topological, and semantic relationships when profiling complex 3D city models. The approach transforms the 3D model’s boundary description, defined using the CityGML standard of the Open Geospatial Consortium (OGC), into a set of unified volumetric features described as solids. This approach is characterized by (1) the use of the concepts of semantic relationships, virtual edges, and virtual surfaces; (2) the semantic analysis of 3D models and the extraction of volumetric features as basic geometric analytic units; (3) the completion of structural connectivity and space coverage for each volumetric feature, which is represented as a solid model; and (4) the use of a reliable 3D Boolean operation for efficient and accurate profiling. A typical detailed 3D museum model is used as an example to illustrate the profiling principle, and the experimental results demonstrate the correctness and effectiveness of this approach.
This paper presents a flexible method for zoom lens calibration and modeling using a planar checkerboard. The method includes the following four steps. First, the principal point of the zoom-lens camera is determined by a focus-of-expansion approach. Second, the infl uences of focus changes on the principal distance are modeled by a scale parameter. Third, checkerboard images taken at varying object distances with convergent image geometry are used for camera calibration. Finally, the variations of the calibration parameters with respect to the various zoom and focus settings are modeled using polynomials. Three different types of lens are examined in this study. Experimental analyses show that high precision calibration results can be expected from the developed approach. The relative measurement accuracy (accuracy normalized with object distance) using the calibrated zoom-lens camera model ranges from 1:5 000 to 1:25 000. The developed method is of significance to facilitate the use of zoom-lens camera systems in various applications such as robotic exploration, hazard monitoring, traffic monitoring, and security surveillance.
The difference between real-time CSCW systems and traditional distributed systems is that the former one is supposed to provide a natural, free and fast interface for multi-user interaction. However, the typical multi-user interaction method applied in 3D CAD systems is strict consistency maintenance, such as locking mechanism and floor control, which may generate a stagnant and unnatural interface. This paper proposes a 3D semanticbased Operational transformation (OT) to support less constrained multi-user interaction and to achieve consistency in collaborative CAD editing (co-CAD) systems, and it can be used in many collaborative CAD/CAM industries.
The real-time visualization of 3D GIS at a whole city scale always faces the challenge of dynamic data loading with high-efficiency. Based on the multi-tier distributed 3D GIS framework, this paper presents a multi-level cache approach for dynamic data loading. It aims to establish in 3D GIS spatial database engine (3DGIS-SDE) the unified management mechanism of caches on three levels, including: the client memory cache (CMC) oriented to sharing application, the client file cache (CFC) organized by index, as well as the application server memory cache (ASMC) of structural consistency. With the help of the proposed optimized cache replacement policy, multi-level cache consistency maintenance as well as multithread loading model designed in the paper, the engine is able to adaptively make full use of each-level caches according to their own application properties and achieve effective coordination between them. Finally, a practical 3D GIS database based on Oracle 11g is employed for test. The experimental results prove this approach could satisfy multi-user concurrent applications of 3D visual exploration.
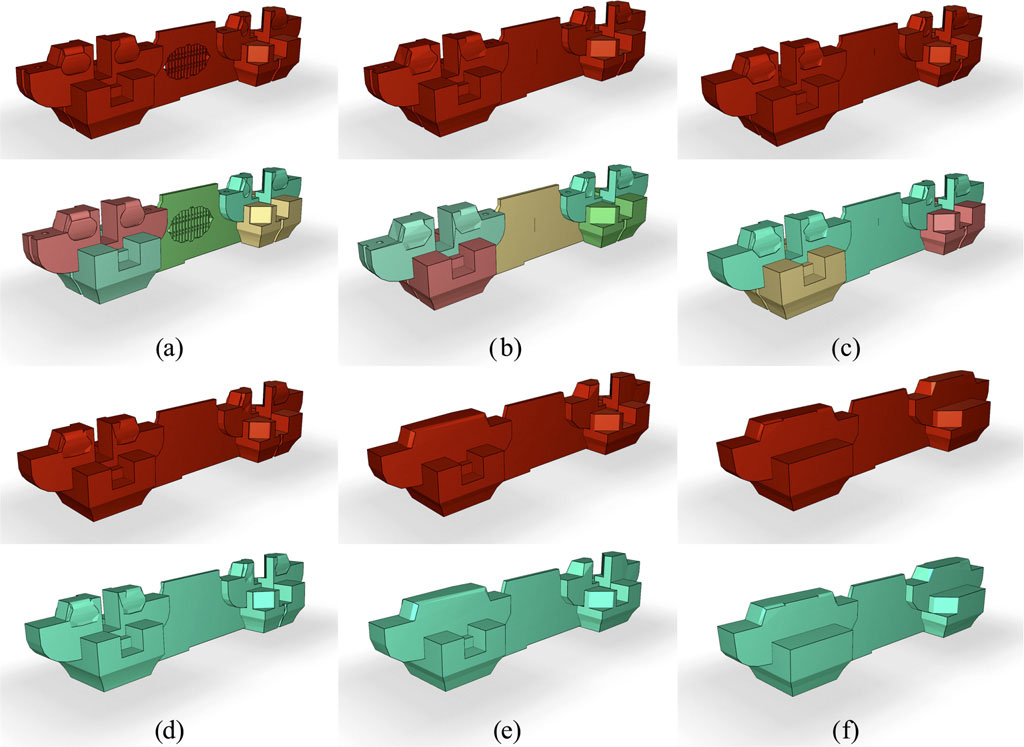
A complex 3D building model contains a detailed description of both its appearance and internal structure with authentic architectural components. Because of its high complexity and huge data volumes, using a less detailed representation for the distant visual application of such a model is preferable. However, most mesh simplification algorithms cannot preserve manmade features of such models, and the existing 3D generalization algorithms are mainly proposed for regular-shaped buildings. More importantly, neither method can consistently express geometry, topological relations, and semantics in multiple discrete Levels of Details (LoDs). This paper presents a novel mathematical morphology-based algorithm that generalizes the complex 3D building model in a unified manner using the following steps: (1) semantic relationships between components, which reflect structural connectivity in the building at a certain LoD, are defined and extracted; (2) semantically connected components are merged and trivial geometric features of the components are eliminated simultaneously, with semantics associated with components then updated according to the merging; and (3) post-process is carried out to further reduce the redundancy of facets. The semantic relationships extracted ensure the proper generalization of topological relations and semantics of building components, and mathematical morphological operations implemented in the algorithm are capable of handling closed two-manifold components of various shapes. Experiments on both complex 3D building models in the classical Chinese style and prismatic 3D city models prove the effectiveness of the proposed method.
Typical characteristics of remote sensing applications are concurrent tasks, such as those found in disaster rapid response. The existing composition approach to geographical information processing service chain, searches for an optimisation solution and is what can be deemed a “selfish” way. This way leads to problems of conflict amongst concurrent tasks and decreases the performance of all service chains. In this study, a non-cooperative game-based mathematical model to analyse the competitive relationships between tasks, is proposed. A best response function is used, to assure each task maintains utility optimisation by considering composition strategies of other tasks and quantifying conflicts between tasks. Based on this, an iterative algorithm that converges to Nash equilibrium is presented, the aim being to provide good convergence and maximise the utilisation of all tasks under concurrent task conditions. Theoretical analyses and experiments showed that the newly proposed method, when compared to existing service composition methods, has better practical utility in all tasks.
Vehicle-borne laser-scanned point clouds have become increasingly important 3D data sources in fields such as digital city modeling and emergency response management. Aiming at reducing the technical bottlenecks of management and visualization of very large point cloud data sets, this paper proposes a new spatial organization method called 3DOR-Tree, which integrates Octree and 3D R-Tree data structures. This method utilizes Octree index rapid convergence to generate R-Tree leaf nodes, which are inserted directly into the R-Tree, thus avoiding time-consuming point-by-point insertion operations. Furthermore, this paper extends the R-Tree structure to support LOD (level of detail) models. Based on the extended structure, a practical data management method is presented. Finally, an adaptive control method for LODS of point clouds is illustrated. Typical experimental results show that our method possesses quasi-real-time index construction speed, a good storage utilization rate, and efficient visualization performance.
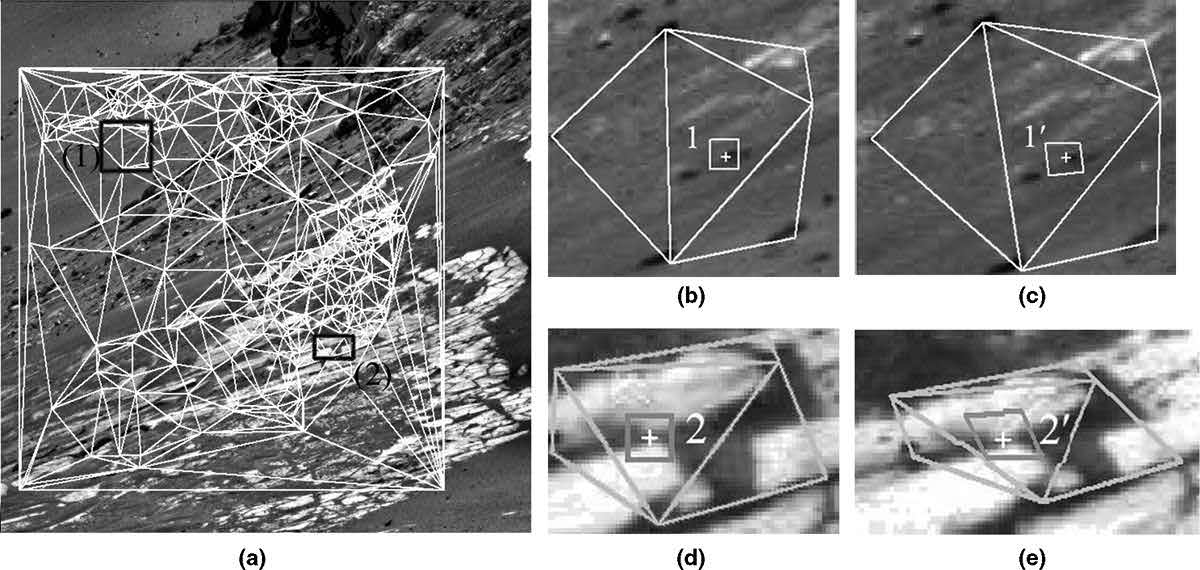
This paper presents a triangulation-based hierarchical image matching method for wide-baseline images. The method includes the following three steps: (a) image orientation by incorporating the SIFT algorithm with the RANSAC approach, (b) feature matching based on the self-adaptive triangle constraint, which includes point-to-point matching and subsequent point-to-area matching, and (c) triangulation constrained dense matching based on the previous matched results. Two new constraints, the triangulation-based disparity constraint and triangulation-based gradient orientation constraint, are developed to alleviate the matching ambiguity for wide-baseline images. A triangulation based affine-adaptive cross-correlation is developed to help find correct matches even in the image regions with large perspective distortions. Experiments using Mars ground wide-baseline images and terrestrial wide-baseline images revealed that the proposed method is capable of generating reliable and dense matching results for terrain mapping and surface reconstruction from the wide-baseline images.
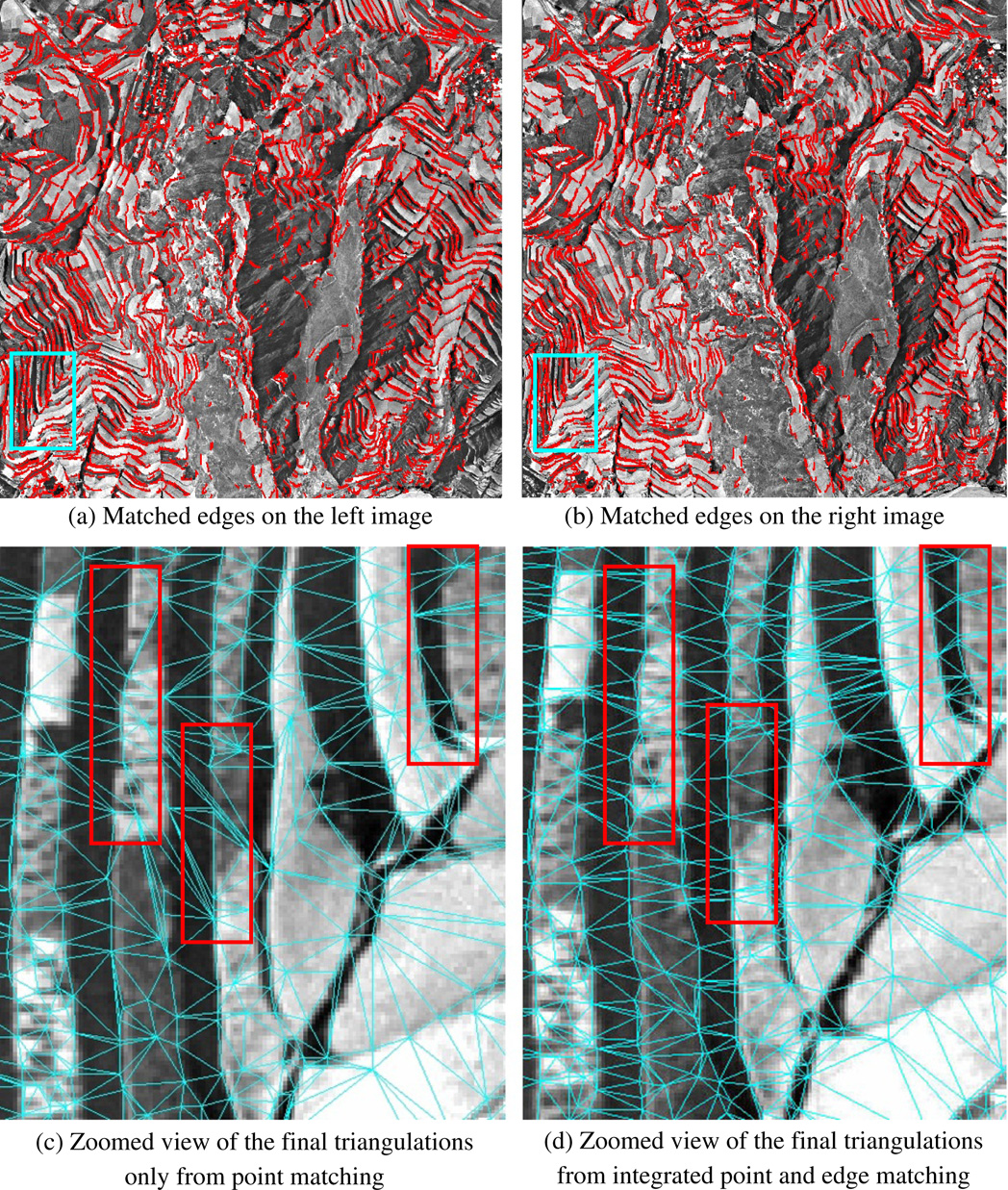
This paper presents an innovative image matching method for reliable and dense image matching on poor textural images, which is the integrated point and edge matching based on the self-adaptive edge-constrained triangulations. Firstly, several seed points and seed edges are obtained on the stereo images, and they are used to construct a pair of initial edge-constrained triangulations on the images. Then, points and edges are matched based on the triangle constraint and other constraints. The newly matched points and edges are inserted into the triangulations and the constrained triangulations are updated dynamically along with the matching propagation. The final results will be the final edge-constrained triangulations generated from the successfully matched points and edges. Experiments using typical space-borne, airborne, and terrestrial images with poor textures revealed that the integrated point and edge matching method based on self-adaptive triangulations is able to produce dense and reliable matching results. Moreover, from the final matched points and edges, 3D points and edges preserving the physical boundaries of objects can be further derived based on photogrammetric techniques, which is ideal for further object modeling applications.
Reliable image matching is an essential and difficult task in digital photogrammetry and computer vision. Possible problems from geometric distortions, illumination changes, scale changes and difficult texture conditions will result in matching ambiguity, especially for close-range image matching. This paper presents a multiple close-range image matching method for surface reconstruction based on a self-adaptive triangle constraint. This method features two aspects. First, the triangles constructed from the previously matched interest points provide strong geometric constraints for the subsequent point matching combined with gradient orientation and disparity constraints. The dynamic update of the triangulation adapts automatically to the changes of image textures. Secondly, a consistency check in object space is performed to remove possible mismatches. Using three sets of actual triple overlapped close-range images for the experiment, the results revealed that the proposed method provides improved matching reliability.
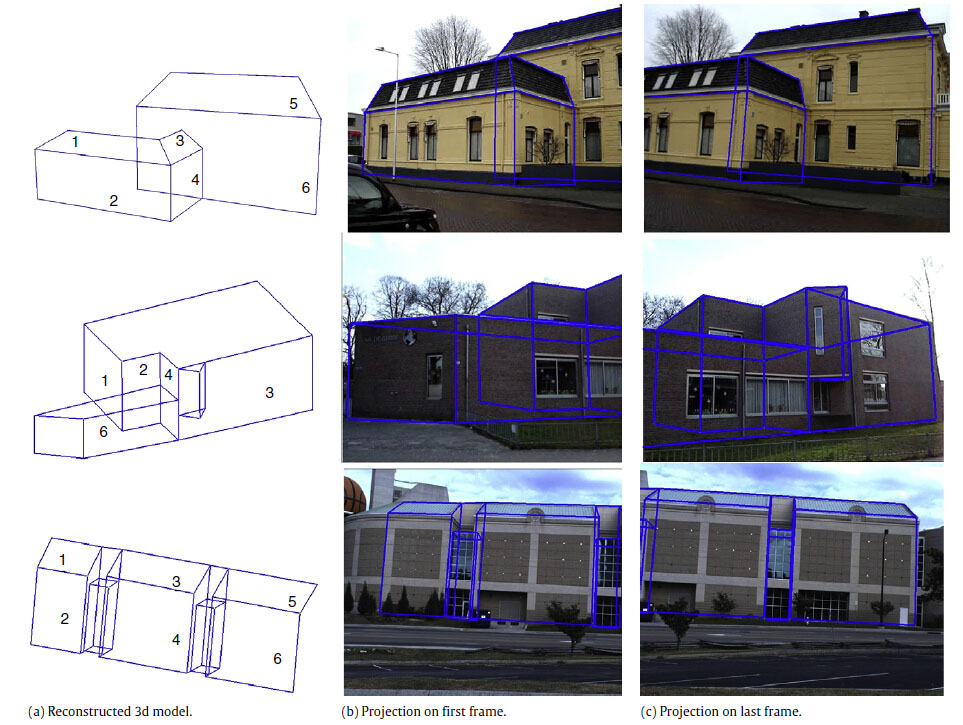
The paper presents an automatic method for the reconstruction of building models from video image sequences. These videos may be recorded using a hand-held camera or a camera mounted on a moving car. Such terrestrial video sequences are economic and flexible. Presenting buildings as geometric models–rather than for instance a representation from a simple meshing of 3D points–enables one to perform a wide range of analyses. However, sparse 3D points and 3D edges do not contain topological relations. Therefore, integrating building structure knowledge into the reconstruction steps plays an important role in our method. First, some rules are applied to reasonably group the extracted features. Then, a suitable outline and normal direction are specified for each surface patch. Based on these surface patches, a hybrid model- and data-driven method is used to recover a building model from both the extracted surface patches and hypothesized parts. Using the building structure knowledge leads to a simple and fast reconstruction method, and also enables one to obtain the main structures of buildings. The results show that this method correctly sets up topological relationships between generated surface patches and also obtains reasonable structure models in occluded areas. Therefore, the reconstructed models satisfy requirements for both visualization and analysis.
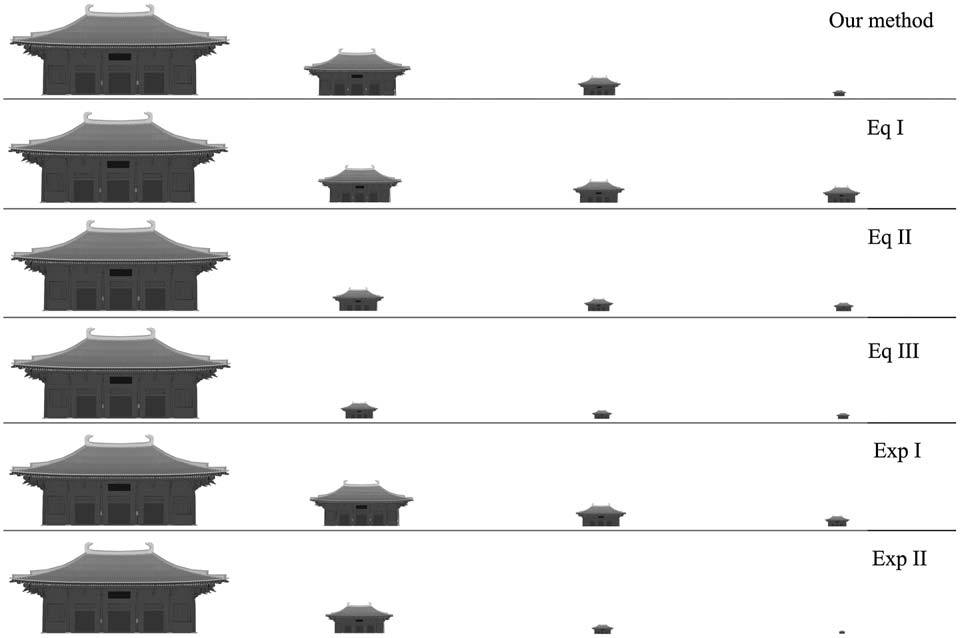
Aiming at the fundamental issue of optimal design of discrete levels of detail (LOD) for the visualization of complicated 3D building façades, this paper presents a new quantitative analytical method of perceptible 3D details based on perceptual metric. First, the perceptual metric is defined as the quantitative indicator of the visual perceptibility of façade details at a given viewing distance. Then, according to the human vision system, an algorithm employing 2D discrete wavelet transform and contrast sensitivity function is developed to extract the value of perceptual metric from the rendered image of the façade. Finally, a perceptual metric function is defined, based on the perceptual metric values extracted at equal interval viewing distances. The minimum detail redundancy model is then proposed for the optimal design of discrete LODs. This method provides a quantitative instruction for generating discrete LODs. The experimental results prove the effectiveness and great potential of this method.
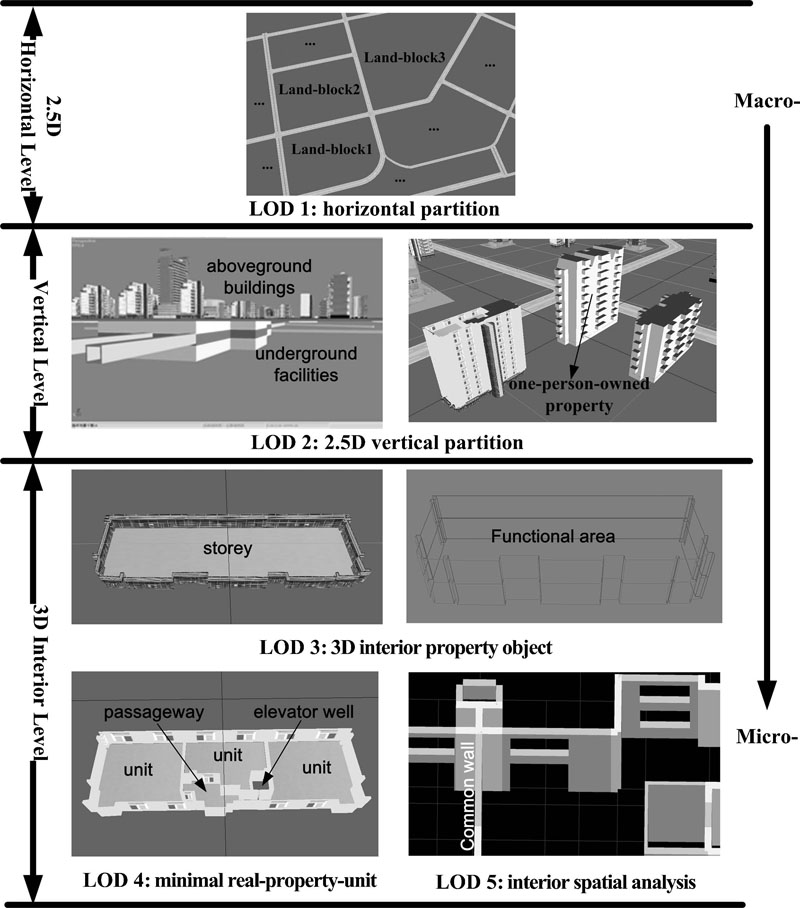
Aiming at the increasing critical issues of existing 2D plans and map‐based methodology for integrated management of advanced buildings and related dynamic property rights in complicated 3D built environments, a novel semantics‐based 3D dynamic house property model with hierarchical levels of detail is proposed in this paper, based on comprehensive analysis of 3D house property objects and various application requirements. This model is characterized by: (1) 3D geometric semantics: a 3D geometry hierarchy of exterior and interior of buildings is defined; (2) thematic semantics, comprehensive house property object and related property right relationships are illustrated; (3) temporal semantics, dynamic representation of house property driven by both geometric events and property right events is involved. This model facilitates comprehensive data mining to analyze spatial relationships and dynamic change of property rights in real 3D built environments and can also support the sale and lease of real estate, facility management, house planning and so on.
The extraction of object features from massive unstructured point clouds with different local densities, especially in the presence of random noisy points, is not a trivial task even if that feature is a planar surface. Segmentation is the most important step in the feature extraction process. In practice, most segmentation approaches use geometrical information to segment the 3D point cloud. The features generally include the position of each point (X, Y and Z), locally estimated surface normals and residuals of best fitting surfaces; however, these features could be affected by noisy points and in consequence directly affect the segmentation results. Therefore, massive unstructured and noisy point clouds also lead to bad segmentation (over-segmentation, under-segmentation or no segmentation). While the RANSAC (random sample consensus) algorithm is effective in the presence of noise and outliers, it has two significant disadvantages, namely, its efficiency and the fact that the plane detected by RANSAC may not necessarily belong to the same object surface; that is, spurious surfaces may appear, especially in the case of parallel-gradual planar surfaces such as stairs. The innovative idea proposed in this paper is a modification for the RANSAC algorithm called Seq-NV-RANSAC. This algorithm checks the normal vector (NV) between the existing point clouds and the hypothesised RANSAC plane, which is created by three random points, under an intuitive threshold value. After extracting the first plane, this process is repeated sequentially (Seq) and automatically, until no planar surfaces can be extracted from the remaining points under the existing threshold value. This prevents the extraction of spurious surfaces, brings an improvement in quality to the computed attributes and increases the degree of automation of surface extraction. Thus the best fit is achieved for the real existing surfaces
Depth contours on a chart are important for safe navigation. The ambiguity problem can appear when points of equal depth are joined in contouring. Unreasonable solutions may mistake a shallow area for a deep one, which could result in a potential danger for navigation. A solution is presented to solve the ambiguity problem using constrained lines formed by two shallow depths. The constrained lines are used to limit the joining of the points with equal depth. Experimental results demonstrate that the proposed solution can reduce the dangers of producing non-existent deep areas in bathymetric contouring.
The efficient display of flooding in intertidal zones is crucial to coastal applications (e.g., coastal zone management and anti-flood directing systems). This paper proposes a new algorithm to plot flooded intertidal areas. Initially, a digital tide-coordinated shoreline (DTS) is traced on the basis of creating a digital intertidal zone model (DIZM) and an instantaneous water surface model (IWSM). Then unconnected depressions are obtained depending on the type of DTS. At the same time, the algorithm detects unconnected depressions by considering the influences of the changing water level, and creates an index from different water levels to corresponding depressions. Finally, unconnected depressions are effectively handled and flooded areas are plotted correctly. Experimental results demonstrate that the proposed algorithm results in a more accurate and efficient display than with traditional algorithms.
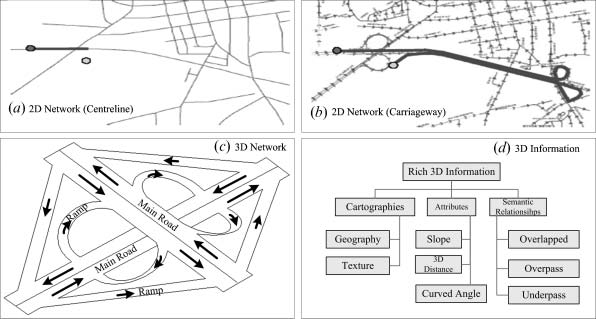
The existing road‐network models based on the 2D link‐node of roadway centrelines have inhibited lane‐oriented network flow analysis and multi‐dimensional inventory management in complicated 3D urban environments. This paper proposes a hierarchical lane‐oriented 3D road‐network model (HL‐3DRNM), with a unified modelling language (UML) diagram. HL‐3DRNM is a non‐planar topological model with the support of a 3D lane ribbon cartographic display, which is characterized by: (1) multiple topological and cartographic representations and various abstraction levels (street, road segment, carriageway and lane); and (2) referenced multi‐dimensional road information (point, line, area and volume) at lane level. HL‐3DRNM provides solid mathematical foundations for a more detailed inventory management, effective network analysis and realistic navigation in the increasingly complicated 3D urban transportation systems.
The sub-pixel location of interest points is one of the most important tasks in refined image-based 3D reconstruction in digital photogrammetry. The interest point detectors based on the Harris principles are generally used for stereoscopic image matching and subsequent 3D reconstruction. However, the locations of the interest points detected in this way can only be obtained to 1 pixel accuracy. The Harris detector has the following characteristics: (1) the Harris interest strength, which denotes the distinctiveness of an interest point, is a grey scale descriptor which computes the gradient at each sample point in a region around the point, and (2) the Harris interest strengths of the pixels in a template window centred on the interest point exhibit an approximately paraboloid distribution. This paper proposes a precise location method to improve the precision of the interest points on the basis of these characteristics of the Harris interest strength. Firstly, a least squares fit of a paraboloid function to the image grey scale surface using the Harris interest strength is designed in a template window and a Gaussian-distance algorithm is employed to determine the weight. Then, the precise coordinates of this interest point are obtained by calculating the extremities of the fitting surface. The location accuracy of this method is studied both from the theoretical and the practical point of view. Experimental analysis is illustrated with synthetic images as well as actual images, which yielded a location accuracy of 0·15 pixels. Furthermore, experimental results also indicate that this method has the desired anti-image-noise and efficiency characteristics.
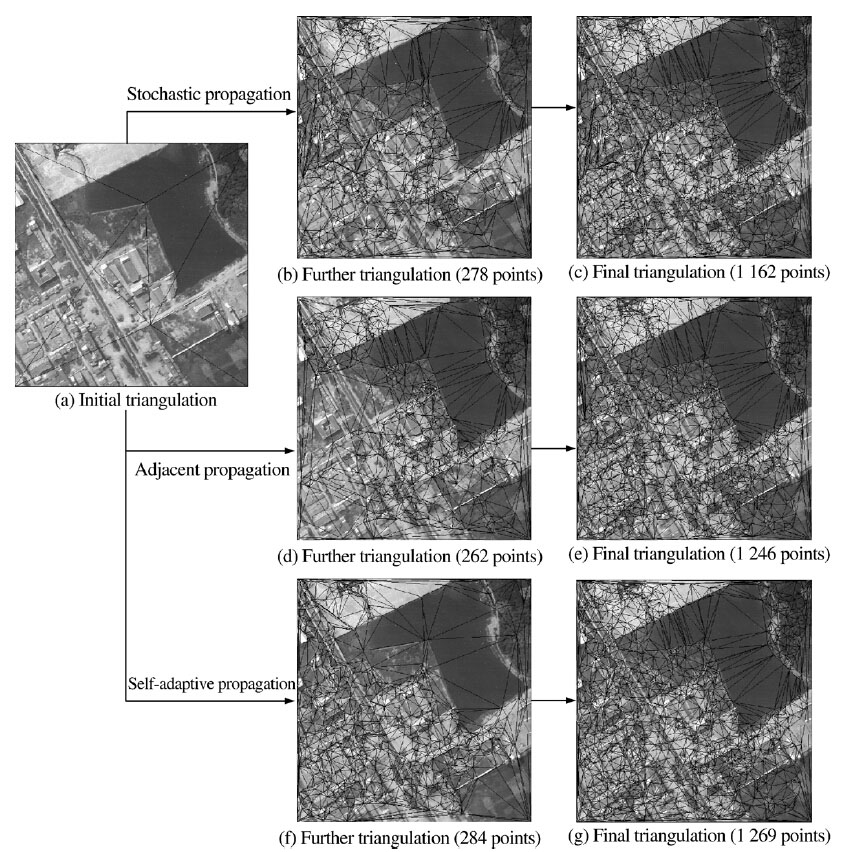
For the purpose of reliable stereo image matching, this paper discusses a novel propagation strategy of image matching under the dynamic triangle constraint. Firstly, the construction and the dynamic updating method for the corresponding triangulations on the stereo pairs are introduced, which are used as both constraints and carriers during the matching propagation. Then, three propagation strategies: the stochastic propagation, the adjacent propagation based on the topological relationship of triangles, and the self-adaptive propagation, which considers the texture features are proposed. The detailed algorithms of these three propagation strategies are also presented. To compare these strategies, a stereo pair with typic texture features is employed to describe the different propagation manners of these three strategies, and an experimental analysis is illustrated with different aerial stereo pairs. From test results, the following has been found: (1) stochastic propagation gives the worst matching results; (2) self-adaptive propagation performs better than the adjacent propagation by making use of the global “best first” strategy. From these conclusions, the self-adaptive propagation strategy is recommended for reliable stereo image matching under the dynamic triangle constraint.
A three-dimensional (3D) spatial index is required for real time applications of integrated organization and management in virtual geographic environments of above ground, underground, indoor and outdoor objects. Being one of the most promising methods, the R-tree spatial index has been paid increasing attention in 3D geospatial database management. Since the existing R-tree methods are usually limited by their weakness of low efficiency, due to the critical overlap of sibling nodes and the uneven size of nodes, this paper introduces the k-means clustering method and employs the 3D overlap volume, 3D coverage volume and the minimum bounding box shape value of nodes as the integrative grouping criteria. A new spatial cluster grouping algorithm and R-tree insertion algorithm is then proposed. Experimental analysis on comparative performance of spatial indexing shows that by the new method the overlap of R-tree sibling nodes is minimized drastically and a balance in the volumes of the nodes is maintained.
This paper compares several stereo image interest point detectors with respect to their repeatability and information content through experimental analysis. The Harris-Laplace detector gives better results than other detectors in areas of good texture; however, in areas of poor texture, the Harris-Laplace detector may be not the best choice. A featurerelated filtering strategy is designed for the Harris-Laplace detector (as well as the standard Harris detector) to improve the repeatability and information content for imagery with both good and poor texture: (a) the local information entropy is computed to describe the local feature of the image; and (b) the redundant interest points are filtered according to the interest strength and the local information entropy. After the filtering process, the repeatability and information content of the final interest points are improved, and the mismatching then can be reduced. This conclusion is supported by experimental analysis with actual stereo images.
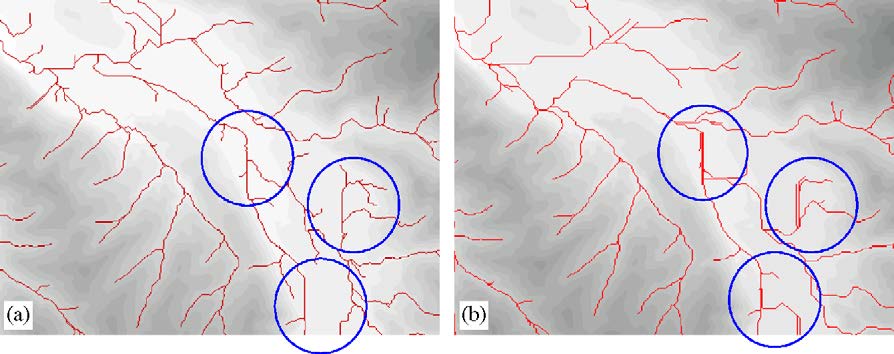
Depression filling and direction assignment over flat areas are critical issues in hydrologic analysis. This paper proposes an efficient approach for the treatment of depressions and flat areas, based on gridded digital elevation models. Being different from the traditional raster neighborhood process which is time consuming, a hybrid method of vector and raster manipulation is designed for depression filling, followed by a neighbor-grouping scan method to assign the flow direction over flat areas. The results from intensive experiments show that there is a linear relationship between time efficiency and data volume, and the extracted hydrologic structures of flat areas are also more reasonable than those proposed by the existing methods.
In order to select proper seed points for triangle constrained image-matching propagation, this letter analyzes the affects of different numbers and different distributions of seed points on the image-matching results. The concept of distribution quality is introduced to quantify the distribution of seed points. An intensive experimental analysis is illustrated using two different stereo aerial images and, based on the experimental results, a seed point selection strategy for triangle constrained image-matching propagation is proposed. An automatic selection method is then introduced that gives good distribution quality for a defined number of seed points.
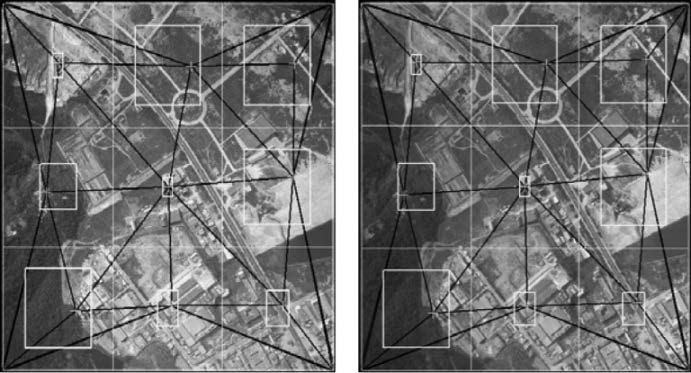
This study demonstrates the utilization of the well-defined points to improve the reliability and accuracy of image matching. The basic principle is: (a) to triangulate a few well-defined points within the stereo model area to form a coarse triangulation; (b) to detect certain amount of corners within each triangle for further matching; (c) to propagate the matching of corner points from the reference points (i.e., the three triangle vertices) to obtain the best matching for each of these corners; (d) to dynamically update the triangulation by inserting the newly matched corner; and (e) to further detect corners and perform matching for them until a pre-defined criteria (the minimum size of triangle or the largest number of points matched) is reached. Experimental results reveal: (a) the false matching caused by the occlusion and repetitive texture is diminished; (b) the accuracy is improved, i.e., with a reduction of RMSE of check points (located in different types of terrain areas) by 12 percent to 62 percent, and a reduction of the largest error by up to two times; and (c) most building corners and boundary points of main objects could be matched directly and accurately.
This paper examines the differences between CyberCity, three-dimensional (3D) geographic information systems (GIS) and CyberCity GIS (CCGIS). A CyberCity is defined as a virtual representation of a city that enables a user to explore and interact in cyberspace with the vast amount of environmental and cultural information gathered about the city. The technical characteristics of a CyberCity GIS prototype software are reported, including the 3D hierarchical modeling technique, the integrated database structure, and the interactive method of visualization of the 3D data of urban environments. The effective integrated data organization strategy for dynamical loading and progressive rendering, which enables CCGIS to support the development, design and presentation of a large CyberCity, is stressed. A pilot application for municipal planning and land information publications has been implemented. This pilot application proved that the hierarchical 3D modeling method and data model are significant to the 3D GIS; the real-time visualization of a large CyberCity needs elaborate data organization and a dynamic loading strategy.
This paper describes a series of tests that measured the effects of 4 factors (accuracy, density of source data, characteristics of the terrain surface, and modeling approaches) on the accuracy of digital elevation models (DEMs). A large area covered by 2 1:10,000-scale maps was selected for testing. The terrain types ranged from flat to hilly to mountainous. Results and conclusions are provided.
Digital terrain modeling has been a research area for more than 40 years in geo-sciences and has become a rather self-contained subject. Digital Terrain Modeling: Principles and Methodology is the only authored book to provide comprehensive coverage of recent developments in the field. The topics include terrain analysis, sampling strategy, acquisition methodology, surface modeling principles, triangulation algorithms, interpolation techniques, on-line and off-line quality control in data acquisition, DTM accuracy assessment and mathematical models for DTM accuracy prediction, multi-scale representation, data management, contouring, visual analysis (or visualization), the derivation of various types of terrain parameters, and future development and applications
Large-scale 3D models are the cutting edge of computer technology
for understanding and planning our urban environments and
infrastructures. These models have emerged from two modelling
structures — systems for architecture, engineering, and construction
(AEC) and geographic information systems (GIS). The problems and
challenges facing today’s modelers, developed for different
purposes, focus almost exclusively on data integration — the ability
to use data originally developed in one modeling system in the other
and vice versa. This need for data transportability is not new, as
evidenced by several authors in this volume. What is new is the
desire to go beyond various conversion programs into an environment
where data is truly integrated, where the modeling framework is more
universal, and where data standards cut across software programs and
vendor-specific platforms.
This book captures the excitement of researchers, organizations, and
vendors in this quest. The border between data structures used
within GIS and AEC continues to diminish. As these two principal
forms of modeling continue to merge, as the result of increased
interest in large-scale 3D models, the need for data structures
capable of supporting both types of modeling efforts, as well as new
types of modeling efforts that combine the best features of both
simple efforts, is manifest.
When disaster occurs, the response phase is viewed as the most critical in terms of saving lives and protecting property. Exploring the development of increased efficiency in emergency services, this volume covers technological advances that allow wider, faster, and more effective utilization of geospatial information. It discusses advances in positioning, virtual reality, and simulation models leading to improved response times in emergency situations. The book also discusses legislative attempts to promote the broader sharing and accessibility of vital information. The authors cover data collection, data production, data management, and 3D routing, as well as lesser known emerging technologies.
书系统介绍了面向任务的遥感信息聚焦服务理论与方法,包括遥感信息共享的多维动态全局逻辑模型——遥感信息球模型,以及基于此模型的任务理解、语义搜索与动态聚合的服务
城市化是一个国家经济发展的重要标志。据联合国《世界城市化展望: 2003年回顾》发布的数字,2003
年世界人口已有48%居住在城市,预计在2007年将达到50%以上,历史上第一次超过农村人口。我国国家统计局最近发布的结果,2003年有40.53%的人口居住在城市,与1990年同项数据18.96%相比,可以看出我国城市化的进程是逐步加快的,发展迅猛。这一方面反映了我国经济的快速增长,另一方面也对我国城市建设及相关的配套设施与政策法规提出了严峻的挑战。面对如此紧迫的形势,加快城市建设信息化的步伐将是解决城市化过程中所出现的各种新老问题的有效办法。
城市信息化的通俗解释就是建设“数字城市”。它是要构建一个以城市地理空间(Geospace)数据和专题数据为基础,以网络计算和通信为工具,协助“人”来更有效地认识、规划、建设和管理城市,也为“人”的生存、工作、生活和安全提供保障的科技、人文环境。
朱庆、林珲二位教授的《数码城市地理信息系统》一书的出版正是应对城市信息化建设的新形势,解决“数字城市”建设中的理论与技术问题,并预见城市信息化前景的一本非常及时的专著。作者在城市地理信息系统的概念、原理和方法上设置了一个十分确切的解释空间,搭建了一个建立数字城市地理信息系统的认知框架,并将多年来国内外同行们在这一领域所取得的丰硕成果经过分析、评价之后融入其中。为我们提供了一条能直接而便捷地进入领域核心地带的途径。
这本书还反映了作者及其团队多年来的科研成果和经验,特别是在数字城市理论方法的深化过程中提出的空间建模、多维分析、数据质量控制等方面的见解,都有很强的启发性和指导意义。
“数字城市”既是目标,也是一个过程。最终要达到什么样的境界目前还说不太清楚。但是可以肯定的说它不是一个单纯的技术系统,而是一个“以人为本”,人机结合的大型综合集成体系。本书在这个问题上的描述有明显的特色和亮点,尽管国内外的研究探索只是刚刚起步,但方向是清晰的,应该引起我们的重视。例如,书中提出的构建分布式的虚拟地理环境,开始强调人与虚拟环境的交互与关系;讨论了地理协同(
Geocollaboration)理论在分布式虚拟地理环境中的应用,这必然会引出认知主体和客体,虚拟与实在(
Reality)等跨计算机、心理学和哲学的多种问题,并将引导“数字城市”研究与开发的深化。
在全球化的网格(Grid)技术的新环境中,城市信息化建设将有新的思路和新的举措。本书可以为这一即将到来的新变革打下一个稳固的基础。感谢作者多年的工作及在地理信息科学的学术交流方面所做的努力和贡献。
城市在这个星球上的出现已经有了五千多年的历史。然而,大规模城市化是过去一百多年中发生的事情。城市的发展是与创新分不开的,这里不仅是指科技方面的创新,也包括文化方面的创新。例如,云南丽江古城凭借文化创新也迎来了发展的机会。近二十年来,城市信息化似乎成为许多中国城市发展的创新契机,并被冠以“数字城市”建设的美喻。与此同时,我们也应该看到城市本身的发展对于城市信息化也提出了挑战。譬如,珠江三角洲和长江三角洲城市群的协调发展,也呼唤出“城市群地理信息系统”的新思路。
近年来,受到“数字地球”(digital earth)概念的影响,“数字城市”(digital
city)在不同的认识层次和学科领域得到了不同的理解,因而具有两层明显不同的含义:广义上被用于描述城市信息化的目标,而狭义上则主要指城市空间信息基础设施。不管如何理解,城市地理信息系统都是其重要的核心内容,并正在积极向动态、多维和网络化方向发展。为了突出虚拟现实技术在城市空间信息交流方面的重要意义,“虚拟城市”(virtual
city)也被用于描述通常由三维场景组成的城市地区,用户能够在里面移动和交互。
城市逼真的三维数字表示由于其在城市基础设施管理、无线通讯网络规划、城市开发决策支持、污染分布仿真、土木工程与军事行动支持等众多领域显现出巨大的应用潜力,从而成为普遍关注的热点问题。如何从二维地理信息系统向城市环境三维描述(三维地理信息系统)转变正日益成为城市数据管理的时髦问题。城市的三维逼真描述——三维城市模型不仅具有传统虚拟现实表现的高度真实感,而且具有三维GIS数据库管理与分析应用等特殊功能并能与其他社会经济信息互联。因此,三维城市模型常被作为CyberCity的代名词,有关其数据获取与管理的研究受到了广泛重视。格林(Gruen)等学者将三维城市模型数据库系统称为“CyberCity
Spatial Information
System”(CyberCity空间信息系统)。针对城市地理环境应用,笔者认为CyberCity Geographic
Information System(CyberCity
GIS)的提法更为恰当,并将其翻译为数码城市地理信息系统。我们认为,数码城市地理信息系统是“数字城市”空间数据基础设施的重要组成部分,也是“虚拟城市”的核心内容;同时,也将其作为GIS向“虚拟地理环境”(virtual
geographic
environment)方向发展的一个初步原型。因此,本书以“数码城市地理信息系统——虚拟城市环境之三维城市模型初探”作为书名。
尽管有关三维城市模型的研究与实践在国内外已经十分广泛,但大多数成果由于立足于特定的有限领域而且都还是分散的、不全面的。比如,广泛应用于城市规划设计评价和旅游目的的各种“虚拟城市”往往侧重于其逼真的视觉表现,而忽略了可靠的空间数据获取方法和灵活的海量数据管理与分析能力。本书力图比较全面地论述当今国内外关于数码城市地理信息系统最先进的理念和研究进展,从摄影测量与遥感和地理信息工程的角度着重论述三维城市模型的数据内容与数据快速获取方法,多种类型数据的一体化管理与集成应用,海量数据的动态交互式可视化等关键技术,为我国正在开展的城市数字化工程建设提供必要的理论铺垫和技术支持。相比其他领域,城市问题具有特别的复杂性,其对
GIS技术提出了更高的要求。因此,本书关于数码城市地理信息系统的理论方法和关键技术对数字化国土、数字化战场环境和地下工程等其他相关领域的应用实践也具有一定的适用性。同时,本书集中反应了数码城市地理信息系统平台软件CCGIS4.0(2003年度国产GIS软件测评推荐软件)研发和大量工程应用实践的成果,争取在理论研究及技术应用两方面均获得发展和创新,体现先进性、系统性、实用性和可操作性的时代要求。当然,由于研究工作的局限,有关虚拟城市环境的其他问题如时态、城市人文环境等还有待在今后的版本中予以充实。书中的许多观点也期待进一步更加广泛的争论。
本书的完成还得到了许多人直接或间接的无私贡献。有关数码城市地理信息系统的研究与实践一直得到了武汉大学李德仁院士和龚建雅教授的关心与支持。李德仁院士在百忙中审阅了书稿,提出了宝贵的建议并给予了鼓励。解放军信息工程大学高俊院士不顾繁忙的学术活动亲自审阅全书并欣然作序,使本书增色许多,令作者深受鼓舞。要感谢测绘遥感信息工程国家重点实验室(武汉大学)和地球信息科学联合实验室(香港中文大学)有关的教师、博士研究生和硕士研究生们给予的极大支持。在几年前首次策划本书内容时,香港理工大学的李志林教授提出了许多宝贵的意见和建议,它们已经体现在今天的书稿当中。作者要感谢眭海刚博士,吴波、赵杰、黄铎、张霞、胡海棠、王静文、韩李涛、李逢春、龚俊、张叶廷、钟正等博士研究生,高玉荣和周艳等硕士研究生的辛勤付出。同时,作者还要感谢香港裘搓基金会赞助朱庆在香港中文大学地球信息科学联合实验室的访问和学术交流,使其有机会与龚建华研究员、辛晓红博士、沈大勇博士、孔云峰博士、杨育彬博士、李响、赵一斌、施晶晶和王纲胜等博士研究生进行深入讨论,并有颇多收益。本书得到了国家973项目“虚拟现实的基础理论、算法及其实现”(2002CB312101)、
国家863项目“ 虚拟地理环境的研究与开发 ”(
2001AA135130)和国家自然科学基金项目“多种类型大型空间数据库集成方法”(40001017)的资助。
最后,作者要感谢武汉大学出版社责任编辑任翔先生以及参与本书出版编辑工作的所有老师艰苦细致的审编工作,使该书顺利面世。
朱庆、 林珲
2004年2月20日
香港中文大学 未圆湖畔
数字化是在本世纪
50年代电子计算机出现后才提出的新概念,而数字高程模型(DEM)的概念在1958年就已经提出了。到了今天,数字高程模型作为地球表面地形的数字描述和模拟已成为空间数据基础设施和“数字地球”的重要组成部分。几十年来对数字高程模型的研究始终方兴未艾、十分活跃。从1972年起国际摄影测量与遥感学会(ISPRS)一直把
DEM作为主题、组织工作组进行国际性合作研究。
尽管有关DEM的论著和论文非常之多,但是,当我读到由李志林和朱庆写的这本书时,我仍然激动不已,一口气把它读完。我为这本书中的理论创造性、方法的实用性和对数字化生产的指导性而兴奋,中国的地球空间信息学后继有人!
本书用简洁的语言,有条理地、系统而全面地论述了数字高程模型的概念、数据获取、建模方法、精度分析模型等。书中对由格网数据建立DEM的表面精度所作的深入分析和对DEM精度与格网间隔及等高距关系的分析具有理论创造性,是本书的一闪光点。
为了推动DEM数据库的建立,作者集中力量对数字高程模型生产的质量控制、数据组织和高程内插方法进行了深入分析,并介绍了生产中的项目设计和数据库建库方法,这些叙述是基于作者在“九五”国家测绘局重点科技攻关项目中的实际工作和调查研究得到的结果,具有实际推广应用价值。
对于DEM的应用,本书侧重介绍了数字地形分析、可视化和在土木工程、水利工程、环境工程及GIS中的应用。这些论述对推动DEM在各领域的应用,乃至在“数字地球”中的应用有实际意义。
可喜的是本书的主要研究成果已在吉奥之星(GeoStar)GIS软件中得以实现,相应的软件模块GeoTIN和GeoGrid已在我国“七大江河”1:10000DEM和全国1:50000DEM数据库建立中立下功劳,成为1999年国家科技部的推荐软件。
基于以上的理由,我愿向广大读者,包括科研、教学、生产和管理方面的读者推荐这本书。长江后浪推前浪,江山代有人才出!也希望本书的作者们不断努力,创造更大的辉煌!
数字地形模拟是针对地形地貌的一种数字建模过程,这种建模的结果通常就是一个数字高程模型(DEM)。自从五十年代后期开始被用于公路设计以来,DEM受到了极大的关注,并在测绘土木工程、地质、矿山工程、景观建筑、道路设计、防洪、农业、规划、军事工程、飞行器与战场仿真等领域得到了广泛应用。
随着科学技术特别是计算技术和空间技术的迅速发展,在DEM的数据获取方法、数据存储和数据处理速度等方面已经取得突破性进展,数字地形模拟已经成为地球科学重要的分支之一。实际上,由于地理信息系统(GIS)的普及,DEM作为数字地形模拟的重要成果已经成为国家空间数据基础设施(NSDI)的基本内容之一,并被纳入数字化空间数据框架(DGDF)进行规模化生产。今天,数字高程模型DEMs已经成为独立的标准的基础产品,并越来越广泛地被用来代替传统地形图中等高线对地形的描述。显然,跟过去提供等高线地形图一样,提供DEMs也已成为各勘测部门的基本任务和日常工作之一。全国范围内的DEMs等价于中小比例尺的基本地形图,而其他大比例尺、高精度的DEMs则与更大比例尺的地形图相当。这些高精度DEMs无疑将由更多的地方或专业部门提供。随着各种精度级别DEMs的普遍可得,过去许多潜在的应用领域现在已经变成十分重要的用户。DEMs作为地球空间框架数据的基本内容,是各种地理信息的载体,在国家空间数据基础设施的建设和数字地球战略的实施进程中都具有十分重要的作用。为了推动DEMs的生产和应用,有必要推出一本内容翔实涉及面广的著作。换句话说,经过40來年的发展,DEMs的理论基础和涉及的主要技术方法都已经成熟,这些理论与技术应该被归纳总结到这样的书中,这也是作者们致力于该项工程的主要原因。
综合作者们十多年来在该领域的研究开发成果、汇集国内外最新的理论与技术成就,我们推出了这本著作。本书首次系统全面地论述了DEMs的概念、数据源、数据获取、建模方法、精度模型、质量控制、数字分析、可视化与应用等基本理论与关键技术,并介绍了实用的生产项目设计和数据库建设的方法。其中,绝大部分内容都是经过作者实际工作考察和对比分析后取得的成果,具有较强的针对性和应用参考价值,许多先进的技术方法都已体现在吉奥之星(GeoStar)地理信息系统系列软件中,并在生产实践中得到了广泛采用。本书力求能为与地学相关学科的各类专业技术(管理)人员进行科学研究、教学、生产和管理等工作提供较完整实用的理论依据与技术参考。
本书是在中国科学院和中国工程院院士、测绘遥感信息工程国家重点实验室主任李德仁教授的热情鼓励和指导下完成的。承蒙他在百忙中审阅全书并作序,特此表示深深的敬意和感谢。感谢测绘遥感信息工程国家重点实验室常务副主任龚健雅博士审阅全书并提出宝贵意见。
感谢研究生周艳、高玉荣和王丽圆同学在资料整理过程中付出的大量艰辛劳动。
我们也非常感谢武汉大学出版社把本书作为她的“数字地球丛书”之一跟读者见面。
Prof. Zhu has a long teaching and researching experiences in GIS, especially on the Digital Elevation Model, 3D GIS and Virtual Geographic Environments.
graduate student, 36 courses, Southwest Jiaotong University
graduate student,Southwest Jiaotong University
graduate student, 36 courses, Wuhan University
graduate student, 36 courses, Wuhan University
graduate student, 36 courses, Wuhan University
graduate student, 36 courses, Wuhan University
Ph.D. student, 36 courses, Wuhan University
overseas student,Southwest Jiaotong University
Southwest Jiaotong University
Prof. Qing Zhu
Faculty of Geosciences and Environmental Engineering
Southwest Jiaotong University
999 Xi'an Road, Gaoxin Xi District, Chengdu, China
中国成都市高新西区犀安路999号
西南交通大学
地球科学与环境工程学院
My office in Southwest Jiaotong University is at the top floor of the 4th Block in the Xipu campus.
I am at my office every day from 8:00 until 16:00 pm, but you may consider a call to fix an appointment.
Some of my supervised students are still in LIESMARS of Wuhan University.
You can also meet me there occasionally!




